

我们认为受高级别自动驾驶对整车算力和电子电气架构的升级需求推动,智能汽车销量持续高增,域控制器发展动能强劲,有望成为中期行业主流趋势。整车厂域控架构渗透率有望加速提升,高性能、集成化、可扩展或将成为域控制器的主要发展趋势。在此过程中,芯片厂商、集成商、整车厂均在域控制器有所布局,各环节竞争要素不同,格局空间各有特征。我们认为,短期本土供应商围绕成本优势及集成能力进行布局,在整车厂智能化平台快速迭代过程中有望实现技术突破,进一步提升市场占有率。
摘要
电子电气架构集中化升级,域控制器快速发展。汽车传统分布式电子电气架构难以满足日益增长的智能化需求,能够集合算力、降低线束及制造成本、提升复用率的域集中式架构应运而生。高性能、集成化(成本控制叠加生产难度降低)、可扩展(软硬件解耦便于OTA升级)三大特征为中期域控制器发展提供动能。受此驱动,我们认为,域控制器渗透率有望提升,2025年全球自动驾驶与智能座舱域控市场空间有望扩容至千亿元人民币。
“芯片+集成商+整车厂”构成产业链上下游。我们观察到:芯片端竞争围绕性能、生态、开发落地、成本四大维度展开;集成端竞争主战场在于软件开发、定制化需求把握及快速量产能力,国际厂商积累深布局广,协调产业链资源能力强;本土厂商借助产能扩张、产品快速迭代、软件能力持续提升强势崛起。
本土供应商实现突围,短期看降本与国产替代,长期需依赖技术迭代。在外部非经济因素的推动下,国产替代需求中长期确定性较强。受此带动下,国产芯片供应商实现了部分突围,华为、黑芝麻、地平线等方案得到采用;国内域控制器集成商则凭借客户协作和产能布局等先发优势实现了业务的突破。我们认为,通过客户资源的积累和配合验证,国内芯片厂商、集成商有望弯道超车实现技术突破及价值链环节上移。
风险
智能汽车渗透率不及预期、电子电气架构升级进度不及预期、竞争格局恶化导致盈利不及预期。
正文
汽车电子电气架构:从分布到集中,域控制器应运而生
汽车电子电气架构持续迭代
传统分布式电子电气架构通过提升ECU数量推动汽车智能化升级。传统的汽车电子电气架构采用分布式,负责电气化、智能化功能实现的ECU通过CAN和LIN总线连接,在低速、少功能的场景下,“ECU处理+CAN/LIN传输”的架构能基本满足要求。然而过去十年,汽车电气化、智能化的发展致使ECU芯片的需求量攀升。从传统的引擎控制系统、安全气囊、防抱死系统、电动助力转向、车身电子稳定系统,再到智能仪表、娱乐影音系统、辅助驾驶系统,还有电动汽车上的电驱控制、电池管理系统、车载充电系统,以及蓬勃发展的车载网关、T-BOX和自动驾驶系统,不一而足。根据我们统计,传统分布式架构下,主流家用轿车需要50-70枚ECU,高级轿车ECU数量破百。例如,2005年宝马7系ECU数量已达65, 2010年奥迪A8所搭载的ECU数量超过100枚。

通过分布式架构满足电气智能化需求存在提升瓶颈。随着智能座舱和自动驾驶的落地,汽车ECU总数迅速增加至几十甚至上百之多,系统复杂度几近上限。传统的分布式结构远不能满足运算需求。根据恩智浦半导体公司(NXP)预测,2015-2025年汽车中代码量将会呈现指数级增长,其年均复合增速为21%。过去汽车的数据速度大约是每秒150千Byte(字节),现在则是以每秒千兆Byte。在今天软件定义汽车和汽车电气智能化的发展趋势下,“ECU+CAN/LIN”的架构日益暴露诸多问题和挑战,我们认为,复杂度提升导致了传统分布式架构处理代码效率的缺失,消弭了传统成熟技术的成本和一致性优势,因此分布式架构的改革势在必行。
渐进的集中式架构应运而生。为了解决分布式低效问题,功能相似、分离的ECU功能被集成、整合至一个比ECU性能更强的处理器硬件平台上,这就是汽车“域控制器(Domain Control Unit,DCU)”。我们认为,域控制器的出现是汽车EE架构从ECU分布式EE架构演进到域集中式EE架构的重要标志。

域集中架构更有利于整车通讯、智能驾驶等功能的探索。不同于“ECU+CAN/LIN”的分布计算与低速总线架构,域集中架构的特点在于高算力(域控制器)和快传输(TSN以太网)。和ECU采用MCU(即微控制处理器,单片机)不同,域控制器多采用SoC,即系统级的芯片,在算力上领先于MCU。我们认为,处理器计算和决策的集中化或是智能驾驶的未来趋势之一,而域控制器是实现集中式架构的主要载体,其主要构成为域主控处理器、操作系统和应用软件及算法。

域控制器是域集中式电子电气架构核心部件
域控制器是汽车集中式架构中功能域的核心。域控制器主要由域控制器芯片、操作系统和应用软件及算法等三部分组成。平台化、高集成度、高性能和良好的兼容性是域控制器的主要核心设计思想。依托高性能的域主控处理器、丰富的硬件接口资源以及强大的软件功能特性,域控制器集成原本需要多颗ECU实现的核心功能,加上数据交互的标准化接口,能较好地降低重复开发成本以及制造成本,为域控制器对分布式ECU的替代提供成本可行性。
域控制器主要通过主芯片实现多种功能。以英伟达Xavier芯片为例,其具有高达32TOPS的峰值计算能力和 750 Gbps 的高速 I/O 性能。可处理来自车辆雷达、摄像头、激光雷达和超声波系统的L5级自主驾驶数据,并实时地处理数十种算法,以用于传感器处理、测距、定位和绘图、视觉和感知以及路径规划。在智能座舱领域,高通骁龙8155芯片同样具有强大的功能,8155是目前领先的智能座舱八核SOC芯片,采用7nm工艺制造,算力为8TOPS,可以同时支持6*摄像头和 4*2K屏幕/3*4K屏幕,支持Wi-Fi6,支持5G,支持蓝牙5.0等功能,调度车载娱乐系统、液晶仪表、抬头显示等智能座舱硬件,充足的算力保证车内屏幕清晰、交互流畅,充分优化使用者体验。我们认为,传统的芯片(MCU)往往只能负责单一职能,相比之下,域控制器芯片算力更强、效率更高。
域控制器是电子电气架构集中化的必由之路,行业终局或为中央计算+区域架构。以域控制器为核心单元的集中式电子电气架构继续演进,将成为集成化程度更高的车辆集中式电子电气架构——Vehicle computer and zone concept(车载电脑),未来车辆通过用高性能的中央计算单元取代现在的分布式计算的架构,将实现“软件定义车辆”的目标。我们认为,车载中央计算平台有望最后走向终极阶段——车云计算(Vehicle cloud computing),行业终局有望实现汽车的云、端协作,提供强大丰富的智能应用以及驾驶功能。

域控制器的分类方式
域控制器主要存在功能域与空间域两种发展路径。功能域方面,汽车电子电气架构按功能可以划分为动力域、底盘域、座舱域、自动驾驶域及车身域,目前出现在主流汽车下一代平台及新势力现有平台中;以特斯拉为代表的“中央计算平台+空间域“的架构,将汽车电子电气架构以车辆特定物理区域进行划分,包含中央计算模块(CCM)、左车身控制模块(BCMLH)和右车身控制模块(BCMRH),基本实现中央集中式架构的出行,集中度更高。
功能域要求产业链厂商协同开发,空间域对整车厂整合能力要求更高。功能域依托整车厂与产业链上游厂商的协同开发,对整车厂软件开发能力要求相对较低,同时功能域软件复用率更高;空间域理论上可以完全实现软硬件解耦,汽车物理层面线束更短、拓扑架构更简单,但要求整车厂有自上而下的软、硬件把控能力,包括底层芯片的架构、整车上执行器的安排、中间层各接口的统一标准等。
在功能域的分类中,底盘域主要与汽车行驶相关,由传动、行驶、转向和制动系统共同构成,由于底盘域零件复杂、集成技术难度大、安全要求高,因此量产的底盘域控制器较少;车身域集成种类相对较少,未来有望被整合进入自动驾驶/智能座舱域;动力域是智能化的动力总成管理单元,借助CAN/FLEXRAY实现变速器、电池、交流发电机等部件管理,为汽车提供动力,由于供应商众多,标准不同,动力域控制器存在现实难度;自动驾驶域主要负责自动驾驶以及主动安全功能的实现,智能座舱主要负责座舱中人机交互等功能的实现。自动驾驶、智能座舱域控制器是当前技术迭代较快、应用较为广泛的域控制器。
智能座舱域控制器
智能座舱域包括HUD、仪表盘(Cockpit)和车载娱乐信息系统(In-Vehicle Infotainment,IVI)三个最主要的组成部分。其中,IVI成熟度、渗透率高,是智能座舱领域最广泛应用的功能之一。
智能座舱域控制器需要不断升级以满足消费者对于智能座舱的需求。目前,行业的边际动能主要为“一芯多屏”的方案升级,信息输入复杂度增加,需要软件增强信息输入质量,帮助驾驶员更好地处理路况,同时更具科技感的座舱有助于品牌形象构建、满足消费者的多元需求。未来,智能座舱域有望通过车内DMS联动智能驾驶域,以实现更加丰富的人机交互体验和提供更安全的行车保障。我们认为,信息交互方式的升级和科技感提升的趋势或将推动智能座舱域控制器不断升级以适配新场景。
自动驾驶域控制器
ADAS:通过干预车辆以及驾驶员行为,降低事故发生概率并提升行车安全,ADAS全称Advanced Driver Assistance Systems,主要包括车道偏离预警系统LDWS、车道保持系统LKS、自适应巡航系统ACC、前碰撞预防系统FCW 、自动泊车系统APA、盲点监测系统 、驾驶员监测系统(Driver Monitor System)、自适应灯光控制ALC、自动紧急制动AEB、夜视系统NVD等常见的十大功能系统。

ADAS:核心部件由三层构成,域控制器负责计算与指挥。包括感知层的三种雷达、摄像头,决策层的域控制器芯片、执行层的控制系统。向上延展至PCB等基础元件,向下延伸至解决方案、模组以及终端应用。根据艾瑞咨询数据,2020年国内L1-L2级别ADAS渗透率为32%,预计2021年提升7ppt至39%;其中,L2渗透率有望由2020年的12%提升至2021年的18%。我们认为,L2进入快速普及期,在技术和应用上逐渐成熟,对于域控制器在三层的统一协调调配要求更高。

自动驾驶渐行渐近,对域控决策能力要求提升。自动驾驶的底层技术包括感应、决策、执行。感应层主要包括毫米波雷达、激光雷达、摄像头、麦克风等传感器,用以收集路况、车况等信息,并将信息传输到决策层,决策层主要处理信息并将指令发送到执行层,决策层以企业核心算法为主,是自动驾驶的核心,例如,集成在自动驾驶域控制器中,联动其余域控制器。执行层主要包括车身的操控系统,包括转向、驱动、制动以及安全控制等。
自动驾驶:域控制器是决策层核心。以自动泊车系统APA为例,域控制器通过收集传感器(摄像头、雷达等)反馈的信息,根据驾驶员的选择自动或手动设置目标泊车位,进行自动泊车轨迹计算,并将计算结果传导至汽车底盘等位置,控制车辆进行自动泊车。
域控制器需求强劲,三重动能驱动千亿元空间
相对于传统的分布式架构,域控制器及其代表的集中式架构是软件定义汽车新逻辑下的趋势。高性能、高异构性是软件定义汽车世代的显著特征之一,智能座舱的体验以及智能驾驶的安全均需要愈发丰沛的算力进行保障,域控制器的存在使得性能的提升和架构的升级更为便捷,进而满足日益增长的算力需求。高集成度更加平衡下游客户对于整体解决方案在一致性、成本、性能方面的要求,因此促进了域控制器的发展;此外,由于提供单位功能的线束、ECU使用量减少,采用域控制器/集中式架构能够提升部署产品速度并减少车重和能耗,为整车厂提供更大的产品策略纵深。
新能源厂商率先涉足集中式架构,传统整车厂已有升级趋势。根据我们观察,新能源厂商如特斯拉、蔚来、华为等率先进行集中式域控制器架构升级,其中特斯拉“中央计算平台+空间域“的架构最为典型;传统整车厂如奔驰、奥迪分别推出相关电动汽车平台及试点车型紧跟电子电气架构升级潮流。如奔驰推出EVA平台,新款奔驰EQS采用全新的电子电气架构,分布在ECU中的算力被有效集中;奥迪A8早在2018年就将一切辅助系统集中于中央驾驶辅助控制单元实现了从分布式到集中式的突破。我们认为,汽车智能化背景下主要整车厂在新平台普遍使用域架构,将有效推动域控制器需求快速提升。

动能1:域控制器集中整车算力,满足各场景运算需求
高性能、高异构性芯片增强域控制器的处理能力。当前智能化汽车算力需求在500,000DMIPS左右,相当于4-5枚左右Intel Core i7-3770K芯片算力(106,913 DMIPS/枚),主要算力分配在自动驾驶域,尤其关注对于环境的感知;此外,人机交互领域同样需要较高的算力。由此可见,智能座舱与自动驾驶领域的运算及数据处理需求是推动算力发展的原始动力。据我们观察,单一类型的微处理器(CPU、GPU、FPGA、ASIC)受限于算力难以满足更高阶自动驾驶需求,芯片厂通过重塑芯片架构,即推出集成异构式SoC来满足智能汽车趋势下的高算力标准。我们认为,为更好地支撑各种场景下的运算需求,域控制器主控芯片采用集成异构式 SoC或成行业趋势。


智能座舱域通过高性能域控制器实现更多场景人机交互。现行的智能座舱域控制器对功能的整合程度仍是痛点,人机交互整合和功能越来越频繁,对于算力、算法要求也越来越高。过去IVI、屏幕仪表独立存在,受不同ECU控制,我们认为,现行的趋势已经逐渐淘汰分离式座舱域,未来趋势或将是功能不断整合、场景不断优化,实现更好的协同分工和开发的成本下降,实现全整合需要高性能、高异构性的域控制器。
自动驾驶域通过高性能域控实现更多长尾场景的覆盖、识别、决策。自动驾驶技术目前是全球科技行业最前沿的方向之一,尚未实现规模量产的L3/L4级别自动驾驶系统存在痛点。L3-L5是高级自动驾驶阶段,典型特征场景长尾化严重,无法用有限的场景和测试来训练无限的实际情况,但小概率出现的事件可能是不可忽视的重要场景,因此,以自动驾驶域控制器的决策核心需要更强的算力、更优的算法/架构、更多的数据。我们认为,自动驾驶对硬件、算法/架构、数据等的需求是推动域控制器持续发展的根本动力之一。
动能2:高度集成的域控制器实现了软硬件解耦,使整车OTA成为可能
传统的分布式架构,软件微调需要各个ECU之间的协调配合。在传统的分布式架构中,如同动物细胞与神经的关系,数据依靠各个ECU之间的CAN、LIN总线进行点对点的传输,复杂功能的实现依靠大量ECU的协调配合,这种ECU间基于信号的点对点通讯使得数据传输、功能实现与软件OTA变得复杂,缺乏灵活性和扩展性。
域控制器往往采用SoA(Service-OrientedArchitecture)架构,顺应智能网联趋势下软硬件迭代要求。在SoA架构中服务是最核心的抽象手段,也是系统最基础的描述单元。SoA架构中最下层是应用层,最上层是业务层,中间是服务接口层,每个服务组件具备独立的功能同时之间的接口遵循统一标准,可以相互访问、组合扩展,实现复用性、可拓展性。通过SoA架构可以让整车厂在不同操作系统、应用平台上整合不同功能,实现对系统功能的快速迭代,实现了组件的软硬件解耦,给OTA带来便利。

动能3:可扩展性架构增强复用能力、降低成本
传统分布式架构存在两大痛点,低可扩展性及高成本。ECU越多意味着车辆的电子功能越丰富,但随之而来是分散ECU模块容易导致车辆线束布置复杂,车身越来越重,从而导致整车成本高昂;另一方面,由于涉及的供应商众多,ECU模块的软件开发同步率低,影响车厂开发速度以及更新频率。例如,根据我们推算, 一辆传统连接的汽车中线束总长度可以达到2000米,电气节点1500多个,这导致线束材料成本居高不下。系统不可持续,而采用了集中式架构的特斯拉Model Y的线束长度只有100米,其重量和成本有望控制。

域控制器能实现更好的可扩展性,以低复用成本增强渗透率。我们从ECU数量来推断,目前高级车辆ECU可达25个以上,当引入5G及L3级以上自动驾驶技术,这些应用程序数据传输带宽需求有显著增长,如采用传统的电子构架,ECU将达到50甚至100个。几乎所有具备了CAN传输的ECU均需运行AUTOSAR协议栈,意味着这些协议栈的代码在每个ECU当中都要复制一份,而使用域集中式的域控制器只需要约30个ECU,因此域控制器所需代码数量实现较大程度的降低。对代码进行维护、修改、更新的时间少、错误概率小,产品一致性更加可以预期,整车厂既能够实现更好、更快地拓客,也可以通过更高频的OTA产品更新提供更新颖的功能增强用户粘性。我们认为,域控制器能赋能OEM低成本并稳定地拓客,给予车厂更好的竞争优势。

低代码量提供更多元化的竞争策略,赋予车厂更多的产品纵深。代码量低除了具备易于维护的特点,更意味着需要使用的芯片、线束更少,进而降低整车重量以及能耗,通过使用域控制器,车厂既可以通过轻量化打出低能耗的差异化战略,亦可在不舍弃能耗表现的情况下堆叠算力实现更加强劲的整车性能表现。综上所述,我们认为,域控制器更加简洁的架构、代码或将助力车厂构筑竞争壁垒,推进域控制器渗透率提升。
市场空间:未来3-5年高速增长
跟随高级别自动驾驶渗透脚步,域控制器市场广阔。我们认为,2021年后自动驾驶等级将从L1向更高级别快速渗透,到2025年预计L1渗透率为20%,L2渗透率为50%,L3渗透率为15%,L4渗透率为0.5%,更多支撑高级别自动驾驶汽车的域集中、中央集中式电子电气架构平台将显著带动域控制器渗透率与单车价值量提高。根据我们基于中性和乐观假设条件下的测算,乐观假设下中国域控制器市场规模预计于2025年达到846亿元,其中自动驾驶域控制器与智能座舱域控制器市场规模有望突破700亿元。

域控制器产业链分工及竞争格局
域控制器产业链及商业模式概览
域控制器产业链分工明晰,芯片是核心部件。上游为芯片、软件提供商,主要负责底层架构的搭建以及芯片的制造,主要由芯片厂提供;部分芯片厂毛利率较高,如传统巨头高通、英伟达等;华为、黑芝麻、地平线等厂商实力逐步增强,具备国产替代逻辑。中游为域控制器集成商,主要基于底层架构做定制化开发,凭借车厂、消费者的深入理解、低成本实现量产而提供价值。下游为整车厂,主要有特斯拉的全栈自研派系以及以蔚来、小鹏、理想为代表的开放产业链派系。

芯片呈现寡头垄断格局,行业中下游竞争相对激烈。域控制器产业链中,最上游的芯片厂商为域控制器提供芯片及相关软件包,凭借算力优势与客户资源积累,行业壁垒最深;域控制器集成商竞争相对激烈,通过与芯片厂/整车厂绑定合作、控制成本、技术积累提供差异化服务,构筑行业壁垒;整车厂目前主攻应用算法层,据我们观察,有从中间层切入整车软件架构定制化开发的趋势,原因如下:1)中间件是软件定义汽车的关键环节,在芯片厂趋同的大背景下(英伟达及高通),软件差异化能力被下游靠终端的集成商与整车厂愈发看重;2)中间件的壁垒相对于芯片等硬件低,部分整车厂已经提出了全栈自研的概念,从中间件到上层应用的一体化实现软件差异化,构筑壁垒的可行性高。
整车厂-芯片供应商-域控制器集成商的三方合作模式助力传统整车厂智能化转型。以德赛西威与英伟达合作完成的IPU03搭载小鹏P7为例。小鹏负责应用层软件开发,将域控制器布置到车上和传感器打通;英伟达作为芯片供应商,提供芯片基础软件包、设计包以及芯片;德赛西威负责硬件生产、中间件层和芯片方案的整合,包括ECU以及接口的设计,加速产品落地。我们认为,小鹏-英伟达-德赛西威的三方合作模式或将成为未来整车厂-芯片供应商-集成商的合作主流模式,对整车厂而言能实现产品的差异化,对芯片厂商而言能快速实现汽车领域突破,集成商如德赛西威起到桥梁作用,发挥集成优势推动汽车向智能化方向转变。

域控制器商业模式1:蔚来、英伟达、德赛西威的合作模式。整车厂-集成商-芯片厂的合作模式有助于最大化禀赋,车厂主导需求、集成商基于理解搭配选配合适的软硬件、芯片厂负责完成芯片以及部分软件的解决方案,该模式能够提升产业链分工效率,将有限的资源应用在最擅长的环节,能够较快相应下游需求,迭代新版本的软硬件,快速获取客户,建立稳定的合作关系,我们认为值得借鉴。以中国大陆市场为例,目前主流芯片厂均已覆盖集成商,并通过集成商进行出货,其中英伟达-德赛西威覆盖的客户群体较为广泛。

域控制器商业模式2:特斯拉全栈自研,主导产业链。除了车厂定义需求逐层下放要求至供应商之外,特斯拉坚持全栈自研模式,将开发流程尽可能掌握在车厂内部。此模式能够充分建立壁垒、提升粘性(例如闭环生态系统的苹果),成为特斯拉产品力的核心支撑。伴随着销量提升带来的规模效应日益增强,成本得到摊薄。我们观察到,该模式正在得到比亚迪、零跑等国内厂商效仿,即坚持全栈自研思路。

总体来看,域控制器行业各厂商基因禀赋各有不同,两种模式各有利弊。除了传统的汽车零部件厂商外,芯片厂、造车新势力、传统整车厂等同样布局域控制器。芯片-集成商-整车厂的三方合作模式实现了产业链上下游分工,实现了整车厂电子电气架构较快速迭代升级,给芯片厂提供入局汽车产业链的路径,同时带动产业链公司快速发展;以特斯拉为代表的全栈自研模式,整车厂实现了软硬件开发流程的全盘掌握,有利于建立产业壁垒实现产品差异化,但对成本及整车厂软硬件能力要求较高。我们认为,软件定义汽车的新产品世代主要竞争逻辑来自于软件与生态,因此对底层能力的追溯就成为竞争的关键点。
竞争焦点:产品定义,功能和成本的平衡
在智能座舱域,竞争聚焦于客户需求洞察及定制化开发。智能座舱更强调对用户使用场景的理解,在这一方面,具备丰富配套经验的汽车零部件企业具备较高的经验壁垒积累,能将用户在不同场景的数据积累转化为对域控制器产品的理解并予以落地。我们认为,在这一领域的算力-算法-数据模型中,除了在算力、算法需要有足够的积累外,对座舱的功能、调性以及用户反馈的数据积累是更重要的维度,这一学习曲线短期内难以被其他类型竞争者、潜在进入者获得,叠加优质的客户资源,整车厂及域控制器集成商在智能座舱产品开发过程中占据主导地位。
在自动驾驶域,竞争聚焦于算力-生态-成本。自动驾驶更强调专业的计算能力,在“算力-算法-数据”模型中,底层的算力、算法能力更加关键,尤其是对于长尾场景的覆盖至关重要。除芯片本身的性能外,厂商对产品路线图、芯片产品系列、生态构建、后续芯片在硬件平台上的升级、开发/落地成本都具有一定要求。我们认为,头部芯片在这一方面具备较强的优势。此外,在生态构建上,英伟达开源NVIDIA DRIVE自动驾驶汽车开发深度神经网络,并向自动驾驶汽车开发者开源其预训练AI模型和训练代码,通过一套NVIDIA AI工具,生态系统内的开发者们可以自由扩展和自定义模型,从而提高其自动驾驶系统的稳健性与能力,我们认为,大厂通过在算力-生态-成本上实现平衡,能够在短期内迅速培养使用者,并通过后续的迭代提升粘性。

竞争格局:主芯片厂商加速抢位,本土集成商具备快速发展潜力
域控制器主芯片
域控制器主芯片是域控制器的价值量核心环节。目前主要的域控制器芯片主要涉及自动驾驶以及智能座舱两个方向,呈现多元化、集成化趋势。自动驾驶域控制器芯片算力持续升级,推动自动驾驶级别升至L3甚至更高。以英伟达两代芯片(Xavier以及Orin)为例,Orin相比Xavier在算力、功能上都有较大进步。Xavier算力达到32TOPS,在L1-L2领域能够实现全速域ACC自适应巡航、车道居中、车道偏离预警等功能;而英伟达Orin芯片不仅具备强大数倍的算力(200TOPS)、亦预留6个(16个,虚拟通道)摄像头接口、并通过VPI为各种不同的硬件提供统一的接口,在自动驾驶L3时代悄然而至的背景下,能够适应蔚来NOP、小鹏NGP为典例的类L3功能(高速自主导航驾驶)对系统高算力要求,推动自动驾驶向更高层次进步。

主芯片升级对域控制器功能的升级同样可见于智能座舱域控制器。以高通较为先进的8295芯片为例,其能够支持同步处理仪表盘、座舱屏、AR-HUD、后座显示屏、电子后视镜等多屏场景需求,CPU、GPU等主要算力较前代版本8155提升50%以上。目前,核心自动驾驶芯片占域控制器总芯片成本约为60%,是最为核心的零部件之一。百度、集度和高通宣布,集度汽车将搭载高通第4代骁龙汽车数字座舱平台SA8295P,该车型预计2023年量产上市。我们认为,随着主芯片集成更多功能,价值逐渐向域控制器集中。
英伟达凭借算力与工具优势在高级自动驾驶芯片市场领先。英伟达的优势在于GPU架构下能够提供冗余算力,既提升安全性,也为未来OTA升级预埋算力,且英伟达提供了丰富的生态与开发工具,集成商既可以直接采购芯片定制化开发,也可以采购整体方案。英伟达在高级别自动驾驶(L3+)客户获取进度上处于领先位置,并在多款车型实现定点以及量产。得益于领先的方案与广泛的客户覆盖,英伟达积累的数据反馈多、回收投资快,因此在产品矩阵更新上进度较快,近期已经宣布将基于下一代Atlan计算平台开发新一代DRIVE Hyperion架构,将于2026年开始进入量产周期,支持14个摄像头、9个毫米波雷达、3个激光雷达和20个超声波传感器,以及舱内的3个摄像头和1个毫米波雷达。我们认为,英伟达有望发挥算力优势,利用现有客户积累拓展智能座舱芯片业务。

高通在智能座舱芯片领域处于领先位置。在智能座舱领域,全球25家顶级车企中有20家选了高通骁龙数字座舱平台。我们认为,高通具备三重优势:1)丰富的产品矩阵提供性能保障;2)高通对安卓操作系统具备经验优势;3)与中间件厂商良好的合作关系进一步丰富了生态。高通产品优势在于算力与能耗的平衡,依托产品低能耗属性有望实现自动驾驶域控制器芯片的渗透。我们认为,高通和英伟达有望在未来实现自动驾驶与智能座舱相互渗透的格局。

除了高通、英伟达外,我们认为,传统厂商TI、英飞凌、熟悉AGL操作系统的三星、基于鸿蒙生态的华为等厂商同样有望在渗透率逐渐提升的智能座舱芯片市场占有一席之地。
域控制器集成商
主机厂围绕主芯片联合集成商打造差异化产品。域控制器集成商作为整车厂的重要的生态合作伙伴,其核心竞争力表现在:1)软件能力边界:在硬件逐渐趋同的趋势下,需要提升软件能力来为硬件赋能,让硬件发挥最佳性能;2)多样化合作模式:面对整车厂的差异化需求,有能力提供差异化的服务;3)工程化落地:量产时需提供相应的供货能力和工程服务能力,以保障产品顺利交付。
域控制器集成商领域,尚未形成头部集中的竞争格局。以智能座舱域控制器厂商为例,我国智能座舱域控制基本由智能座舱一级供应商的座舱产品迭代推出,根据华经产业研究院数据,我国智能座舱前装市场中市场份额领导者为德赛西威及东软睿驰,行业2020年CR4为36%,市场集中程度不高。我们认为,头部厂商有望凭借与主流芯片厂商的前期合作、与整车厂的协同开放绑定和规模化量产的成本优势实现市场份额的快速渗透。

自动驾驶领域,芯片厂与集成商深度绑定、共同研发成为主流趋势。与芯片厂充分绑定能够较大程度地发挥集成商的优势,根据客户需求基于芯片、算法进行深度的定制化。以德赛西威深度绑定英伟达为例,德赛西威基于英伟达Xavier、Orin芯片推出了多款域控制器,客户包括理想、小鹏、蔚来、一汽红旗等,受益于提前布局英伟达合作,德赛充分发挥自己作为本土集成商的禀赋,2021年H1实现智能驾驶业务营收5.71亿元,同比增长182.68%。
在智能座舱领域,基于芯片定制化、集成化开发成为主流。厂商基于芯片进行深度定制化开发,并集成多种功能。以华阳集团为例,其基于瑞萨R-CAR H3 和高通8155 座舱芯片开发域控制器能集成IVI、液晶仪表盘、副驾驶屏、HUD等功能,同时优化可扩展性,预留多个接口,未来或将同DMS 等功能打通形成一体化产品。我们认为,这一模式有助于整车厂与供应商形成协同效应,有望成为主流合作方式。
国内厂商:通过技术升级实现国产替代
域控制器芯片厂商
域控制器主芯片具有典型的先发优势特征。其一显著边际成本下降曲线;其二为经验壁垒;其三为领先的资本开支为产品迭代带来的飞轮效应。芯片需要大量的算法积累,软件/算法的边际生产成本较低,先发优势有助于企业完成商业拓展与持续研发投入,进而夯实产品壁垒正循环。因此,芯片领域有较为明显的马太效应。目前,英特尔(Mobileye)在L1-L2全球市场份额超70%,在高级别(L2+级以上)领域,英伟达和高通竞争实力不俗。
地平线、华为是国产厂商优秀代表,具备较强的国产替代能力。地平线通过以“算法+芯片+工具链”为基础技术平台的芯片,提供智能驾驶解决方案,赋能物联网,产品矩阵专注于智能汽车(征程系列芯片)以及智能汽车运算平台(Matrix),目前已有5轮迭代。地平线关注生态构建,提供芯片,平台,开发工具链、操作系统,提供一整套逻辑路线清晰的产品和解决方案。此外,华为亦提供产品端到端的方案,但包括云在内的全链条方案不支持开源,因此在大厂客户的获取上具有一定难度,但对于长尾中小OEM则是较好的合作伙伴。我们认为,当前部分国内厂商具备一定技术实力,有望借助整车厂国产替代需求逆势前行。

域控制器集成商
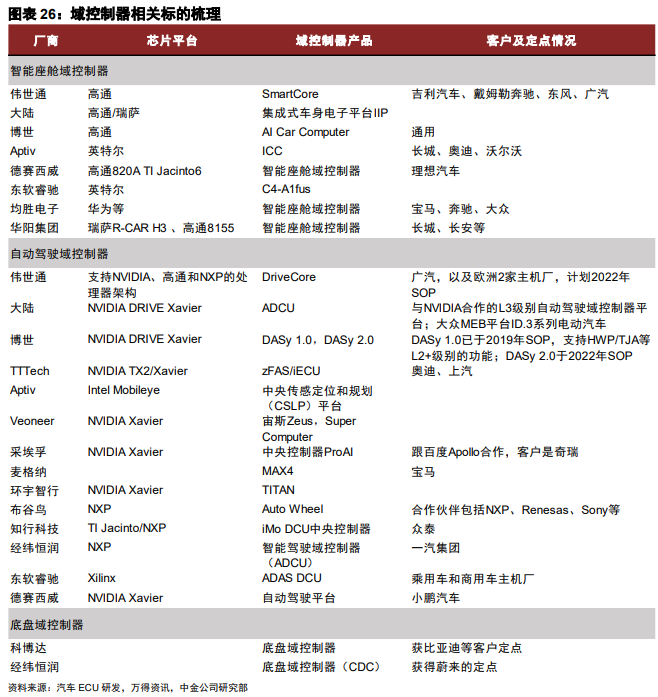
国内域控制器供应商通过与客户紧密合作,有望实现弯道超车。外资主流集成商自动驾驶域控制器方案布局多年。目前外资集成商巨头基本都已布局自动驾驶域控制器,代表产品包括伟世通DriveCore、博世DASy、大陆集团ADCU、采埃孚ProAI、Veoneer Zeus、麦格纳MAX4、安波福CSLP等,具备先发优势以及客户、场景积累。国内域控制器需要构建软硬件结合能力,满足客户需求。国内域控制器厂商重视算力表现,通过算力突破满足客户需求。例如,德赛西威深度绑定英伟达(基于Orin的IPU04算力达到254TOPS)、东软睿驰(预计算力达到500TOPS),此外,亦有均胜电子同黑芝麻科技合作部署域控制器、经纬恒润基于Mobileye EyeQ4以及英飞凌AURIX布局域控制器。国内域控制器集成商在高算力与低成本提供多元化价值主张的背景下,短期内有望实现渗透率的提升。

长期来看,客户经验积累叠加软件设计能力,国产域控制器集成商或迎来发展良机。域集中式架构中,集成商的定位是解构。对整车厂而言,芯片公司提供的方案大部分是黑匣子件,需要通过集成商来逐步分层打开,才能在应用算法层做出差异化。因此,芯片供应商需要找到有中间层开发经验、并且在自动驾驶领域有布局的集成商。集成商的优势在于以合理的成本将产品生产出来并且加速产品落地,在负责中间层开发和设计的时候也可了解自动驾驶芯片的硬件架构、软件工具等资源,并实现软件接口在其他项目上的复用。我们认为,国内集成商若要在长期构建竞争壁垒,需要通过客户经验积累提升软件设计能力+硬件整合能力(甚至突破“圈层”,直接参与芯片等硬件的生产)。在短期利用成本竞争的基础上进行职能多元化,或将成为长久之计。
投资风险分析
智能汽车渗透率不及预期。我们认为电动化智能化趋势驱动下智能汽车有望提高,但若消费者需求发生变化,市场对汽车智能化接受程度不及预期,将会影响产业链公司营收。
电子电气架构升级进度不及预期。我们认为,汽车电子电气架构有向集中化架构升级的趋势,这需要产业链上下游厂商相互配合推动技术升级。若电子电气架构升级进度不及预期,将会影响汽车智能化进程,进而影响产业链公司业绩。
竞争格局恶化导致盈利不及预期。随着市场空间逐步扩大,域控制器市场参与者或持续增加,若竞争格局恶化将影响产业链上下游厂商盈利情况。
文章来源
本文摘自:2022年4月2日已经发布的《汽车电子系列四:电气智能未来所向,域控集成扬帆起航》



